BIRDS-3 has 4 main missions in total; LoRa Demonstration Mission (LDM), Imaging Mission (CAM), Attitude Determination and Control Mission (ADCS) and Software Configurable Backplane Mission (BPB) .
LoRa Demonstration Mission (LDM)
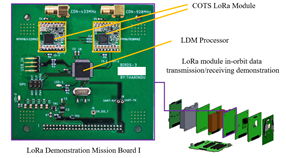
The mission board has two RFM95W Semtec Long Range (LoRa) modulation based transceivers for LoRa Demonstration Mission (LDM). The two LoRa modules are connected through a RF cable to facilitate communication between them. The mission aims to verify on-orbit operation of the transceiver by sending data from one module to the other. No antennas will be connected. The design has taken to ensure there are no RF leakage outside the satellite. A 50db attenuator has been placed between the two transceivers to ensure that.
Imaging Mission (CAM mission)
The CAM mission statement is to take image(s) from space primarily for media and outreach programs. The objective is to take image(s) for publication in national news media and to raise awareness about the existence of satellite in space. The images will also be used in schools in participating countries to identify landmass and stars for outreach. For that, the mission aims to take identifiable landmass and stars from 400 km orbit.
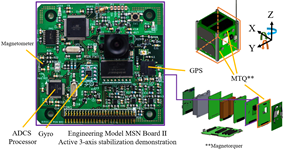
Attitude Determination and Control Mission (ADCS)
The mission statement of ADCS is to stabilize the satellite’s attitude by active control. This will be the first in the BIRDS series towards active attitude pointing in future BIRDS missions. This active stabilization is achieved using a 3-axis Magnetorquer (MTQ). Active stabilization is achieved using a 3-axis Magnetorquer (MTQ). The MTQ have been placed on the Rear Access Board (RAB) for X-axis, -Y Panel for Y-axis and –Z Panel for Z-axis. Each MTQ has 100 trace turns with a maximum current of 0.03A generating a torque of 2.12 x 10-6 Nm.
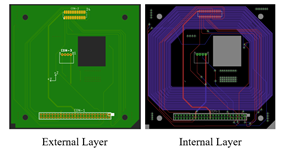
Software Configurable Backplane Mission (BPB)
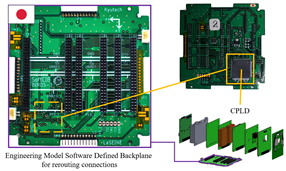
BIRDS-3 BPB mission statement is to demonstrate the use of a standard software configurable backplane developed at Kyutech for future CubeSat mission. To reduce risk, only the Japanese Uguisu will be conducting the BPB. The other two satellites will use a hardwired backplane similar to previous projects.
The first objective is to reroute the pin layout of the backplane by programming. This aims to reduce cost and time during hardware development. The other objective is to demonstrate all missions can be achieved through the backplane in orbit till satellite’s end of life (EOL).